
本文来源:智车科技
/ 导读 /
日本索尼公司去年通过原型车「VISION-S」高调进入了自动驾驶领域。
VISION-S已经完成了开发,并从今年初开始在奥地利上路测试。
而近日,索尼又公开了一款面向车载LiDAR的基于堆叠式dToF(直接飞行时间法)的测距传感器,并使用SPAD像素作为探测单元。
索尼开发的这款激光雷达的主要特点是,能够高精度、高速以15cm的间隔测量长达300米的距离,并且即使在-40℃到125℃的剧烈温度变化和恶劣的天气条件下也可以保持高可靠性。

主要规格参数

SPAD dToF的原理
深度传感器的测量机制一般有三种:结构光(例如iPhone的FaceID)、相机阵列(摄像头)和ToF(激光雷达用)。结构光和相机阵列是基于几何原理做间接深度估计,而ToF(time-of-flight,飞行时间)则是测量发射光和反射光之间的飞行时间并根据光速来直接估计目标距离。
ToF可以分成间接飞行时间(iToF)和直接飞行时间(dToF)两大类。dToF和iToF的原理区别主要在于发射和反射光的区别。
dToF即直接发射一个光脉冲,并测量反射光脉冲和发射光脉冲之间的时间间隔,从而得到光的飞行时间并计算距离。
iToF发射的并非一个光脉冲,而是明暗强度呈规律变换的正弦波调制。通过检测接收到的反射调制光和发射的调制光之间的相位差,测量出飞行时间,从而估计出距离。
顺便提一下,苹果最新的ipad pro和iPhone12 pro的激光雷达也是采用了dToF技术。
dToF的优势:
· dToF可以同时实现较远的测距距离和较高的测距精度。
· dToF对于环境光干扰较不敏感,可以在不同光照强度的场景下使用。
SPAD(Single Photon Avalanche Diode,单光子雪崩二极管)是dToF传感器常见的探测单元。SPAD是一种可以检测弱光的像素结构,即利用雪崩倍增效应放大来自单个入射光子产生的电子,从而可以探测微弱的光。
将SPAD作为激光雷达dToF传感器中的探测单元,可以实现远距离、高精度的深度测量。
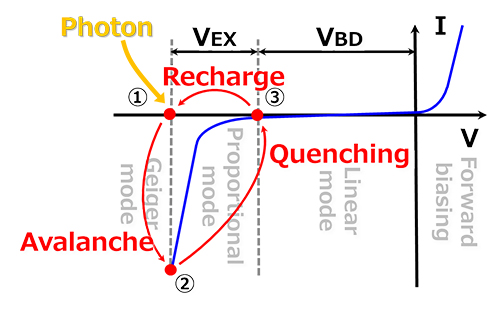
SPAD像素的原理
所谓堆叠式,是通过Cu-Cu连接SPAD像素芯片和逻辑芯片,来实现导电。该方法可以提高设计灵活性、生产率,同时实现小型化和高性能。
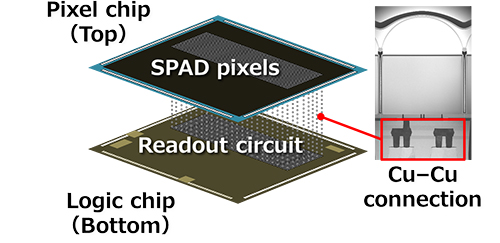
堆叠式结构

越来越多的公司专注于LiDAR
日本的索尼、佳能等半导体相关公司凭借长期以来在CMOS图像传感器领域的积累,拥有相对领先的技术,从而进入自动驾驶车载传感器领域。
例如,先锋公司(Pioneer)于2019年4月与佳能合作开发3D-LiDAR传感器,并已发布了一种小型、高性能的量产模型3D-LiDAR。2021年1月,在CES 2020上,先锋又推出了能够测量500米长距离的下一代3D-LiDAR原型。而东芝公司将研发重点放在LiDAR相关技术上,2019年4月公开了一种测量算法技术,该技术提高了LiDAR的距离测量分辨率。2020年7月,东芝又研发了一系列用于固态LiDAR的光接收技术,可支持L4或以上的自动驾驶。
实现自动驾驶的方法大致有两种方案,一种是使用激光雷达,另一种是不使用激光雷达。目前前者占多数,并且越来越多的公司专注于LiDAR的开发。
根据某市场预测报告,从2017年到2030年,包括LiDAR在内的激光传感器市场规模预计会扩大200倍。
另外,最近苹果与多家LiDAR供应商联系以开发自动驾驶EV,也成为热门讨论话题。俯瞰整个自动驾驶行业,可以说激光雷达公司的发展势不可挡。











