引言
在智能驾驶的江湖里,一场“模块化”与“端到端”的华山论剑正悄然上演。
传统模块化设计如同分科教学的老师,各司其职却难免衔接不畅;
而端到端技术则像一位全科通吃的“超级大脑”,从感知到决策一气呵成,让汽车秒变“老司机”。
特斯拉、小鹏、理想等车企纷纷押注端到端,甚至有人放言:“不用端到端,L4自动驾驶就是空中楼阁!”
这场技术革命究竟是噱头还是真金白银?
无人车来也(公众号:无人车来也)和你一探究竟!
(参考阅读请点击:
《既未科技:加入端到端阵营,推出“灵龙架构”,破解无人物流规模化落地难题》)

一、端到端技术:自动驾驶的“超级大脑”
端到端技术的核心在于“感知决策一体化”,就像人类开车时,眼睛看到路况后直接反应到手脚操作,无需大脑分模块处理。
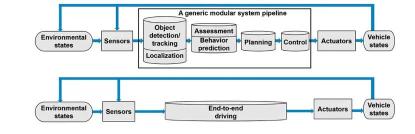
传统模块化设计将感知、决策、规划、控制拆成独立模块,信息传递如接力赛,容易掉棒;
而端到端技术则通过单一神经网络,将传感器数据直接映射为控制指令,省去中间环节,效率飙升。
1、案例:特斯拉FSD V12的“鸟瞰视角+Transformer”
特斯拉的FSD V12系统堪称端到端的代表作。
它采用BEV(鸟瞰视角)和Transformer模型,将8颗摄像头的数据统一映射到三维空间,实现全局感知。比如,在复杂路口,系统能同时识别行人、车辆、红绿灯,甚至预测其他车辆的轨迹,决策速度比人类还快。
特斯拉通过全球超20亿英里的辅助驾驶数据训练模型,让FSD在面对“鬼探头”、无保护左转等长尾场景时(当然主要指欧美场景,中国的场景还在摸索中),也能游刃有余。
2、数据说话:效率提升30倍
小鹏汽车的XNGP系统在应用端到端后,三网合一神经网络(XNet+XPlanner+XBrain)实现每2天迭代一次,智驾能力18个月提升30倍。
理想汽车则通过双系统架构(端到端+VLM视觉语言模型),在复杂场景下实现毫秒级响应,违停、紧急避险等关键指标显著改善。
二、端到端为何能崛起?三大驱动力揭秘
端到端技术的崛起并非偶然,而是技术、市场、政策三重因素共同作用的结果。
1. 技术突破:硬件算力+算法演进
端到端技术依赖高算力芯片和深度学习算法。
特斯拉自研的HW4.0芯片算力达720TOPS,配合Dojo超级计算机,为模型训练提供强大算力支持。
国内车企也不甘落后,理想汽车训练算力达5.39EFLOPS,预计2024年底将超8EFLOPS,每年投入超20亿元。
比如,上海AI实验室的PPGeo框架通过自监督几何建模预训练,增强模型驾驶能力;
TCP方法则通过多任务学习和前瞻性设计,在CARLA Leaderboard上夺冠。
这些研究为端到端技术的量产落地提供了技术支撑。

2. 市场需求:从L2到L4的跨越
消费者对高阶智驾功能的需求日益增长,城市NOA(Navigate on Autopilot)成为车企竞争的焦点。
端到端技术通过全局优化和泛化能力,显著提升城市NOA的表现。
比如,小鹏汽车的XNGP系统支持城区NOA全国开通,理想汽车的4D One Model架构则通过海量用户驾驶数据训练,提升城市复杂场景下的表现。
3. 政策松绑:L3级自动驾驶商业化加速
近年来,各国政策逐步松绑,L3级自动驾驶商业化进程加速。
比如,中国允许车企在特定场景下开展L3级自动驾驶测试,为端到端技术的落地提供了政策保障。
三、端到端技术的争议:L4的终局还是营销噱头?
尽管端到端技术风头正劲,但争议也随之而来。
一方是车企掌门人,如马斯克、何小鹏,力挺端到端;
另一方是L4自动驾驶公司高管,如侯聪、侯晓迪,认为端到端无法直接实现L4。
争议点1:黑盒不可解释性
端到端模型如同“黑盒”,输入数据后直接输出结果,中间过程难以解释。
这对L4级自动驾驶的安全性构成挑战。
比如,Waymo的Robotaxi依赖高精地图和规则驱动,用户反响良好;而特斯拉的FSD V12曾出现冲上路肩、夜间剐蹭等问题。
争议点2:数据与算力需求巨大
端到端技术依赖海量数据和强大算力。
特斯拉通过影子模式持续收集用户数据,但国内车企的数据量仍与特斯拉有差距。
奇瑞汽车副总经理谷俊丽认为,国内车企需达到特斯拉级别的百万量级数据,才能实现端到端技术的规模化应用。
争议点3:技术路线分歧
车企与供应商在端到端技术上产生分歧。
车企倾向于全栈自研,以实现数据闭环和快速迭代;而供应商则认为端到端难以成为标准化产品,需针对不同车型重新训练模型,成本高昂。
比如,华为成立大模型部,部署架构与方案部,撤销原来的感知部、规划与控制部;
理想汽车则将大模型重新组成一个团队,负责端到端架构的研发。这些调整反映了车企对端到端技术的重视。
四、端到端技术的未来:从L2到L4的进化之路
尽管争议不断,但端到端技术无疑是自动驾驶未来的重要方向。
随着数据积累、算力提升和算法优化,端到端技术有望逐步突破瓶颈,实现从L2到L4的进化。
1. 数据驱动:从“喂养”到“进化”
端到端技术的核心在于数据驱动。
车企通过影子模式、众包数据等方式收集海量驾驶数据,不断优化模型。
比如,特斯拉的FSD V12通过100万段真实驾驶视频训练,让车辆像人类一样“直觉驾驶”。

2. 硬件协同:车端与云端的“双剑合璧”
端到端技术需要车端与云端的协同。车端芯片负责实时决策,云端超算中心负责模型训练。
比如,特斯拉的Dojo超级计算机为FSD V12提供算力支持,理想汽车的云端蒸馏技术则将复杂模型知识传递给车端轻量化模型。
3. 算法创新:从模仿学习到强化学习
端到端技术的算法不断创新。
模仿学习通过专家行为克隆实现策略学习,强化学习则通过“试错”优化决策。
比如,小鹏汽车的XNGP系统结合模仿学习和强化学习,提升复杂场景下的应对能力。
4. 世界模型:自动驾驶的“终极答案”?
世界模型被认为是通往自动驾驶的“终极答案”。
它通过仿真与建模,还原真实世界的复杂场景,为自动驾驶系统提供训练和测试环境。
比如,蔚来、理想等车企已发布世界模型,通过生成式模型、自回归模型等技术,提升系统的泛化能力和安全性。
五、结语:端到端技术,自动驾驶的“奇点”已至?
端到端技术正以颠覆性的姿态重塑自动驾驶格局。
它让汽车从“模块化机器人”进化为“超级大脑”,在效率、泛化能力、计算效率上全面碾压传统方案。
然而,黑盒不可解释性、数据与算力需求、技术路线分歧等问题,仍是端到端技术走向L4级自动驾驶的拦路虎。
但无论如何,端到端技术已成车企智驾布局的“必争之地”。特斯拉、小鹏、理想等车企的激进布局,华为、蔚来等供应商的深度参与,都在推动端到端技术从实验室走向量产。
总之,无人车来也(公众号:无人车来也)认为:
也许车企们押注端到端,不是因为它是自动驾驶的终局,而是因为它是最快能变现的商业模式。至于自动驾驶的真正未来?可能藏在端到端的黑盒里,也可能藏在世界模型的虚拟宇宙中 —— 但无论如何,这场烧掉上千亿的赌局,才刚刚翻开新的牌面。亲!你怎么看?
#无人车来也 #无人驾驶 #自动驾驶 #端到端
原文标题 : 端到端自动驾驶爆火!特斯拉理想小鹏赌上全部身家,L4无人驾驶的终局还是营销噱头?