
知情郎·眼|侃透公司专利事儿
近期知情郎高度关注智能驾驶AI技术,今天继续解读相关领域专利。
如果你开纯电车在高速路上爆胎了,怎么办?
很多司机、尤其是新手司机,最怕就是上高速突然爆胎,不敢急刹车、也不敢急打方向盘急停,不知道如何是好。
因为爆胎撞上高速车道栏杆的事不要太多!
吉利日前公开的新专利告诉你,如何用智能驾驶技术控制爆胎车辆巧妙规避障碍物!
看了下,这专利针对纯电、插电混动的新能源车,新司机上路遇到爆胎不用手忙脚乱乱踩刹车打方向盘了,高级辅助驾驶系统帮你搞定了!
该专利名为《一种车辆爆胎的智能控制方法及相关装置》, 专利申请人是浙江吉利控股集团有限公司,宁波吉利汽车研究开发有限公司。
技术背景介绍
现有的智能驾驶车辆在车辆行驶的过程中,通常仅考虑在车辆处于正常的行驶状态下时,对智能驾驶车辆所处的道路环境进行实时感知,从而利用感知到的道路环境,对智能驾驶车辆的行驶轨迹进行智能规划。
然而,在智能驾驶车辆发生爆胎的这一突发情况下,现有技术通常采用悬挂、制动等方式对车辆本身进行减速控制,亦或是将智能驾驶车辆的驾驶模式切换至手动驾驶模式,以便内部驾驶者对发生爆胎后的智能驾驶车辆进行手动控制,当道路上存在其他道路参与者或障碍物体时,上述方式容易产生严重的安全事故。
简单描述,即当下的智能驾驶车辆在面对爆胎突发情况,系统还不够智能化,无法快速帮司机处理驾驶风险,经常导致爆胎车辆撞上旁边的障碍物。
这个问题,其实在燃油车时代也难解决,燃油车不智能!
面对爆胎,大部分靠司机手动挡决策,如果司机反应快经验丰富,那么,可以在爆胎情况下,通过降低车速稳住方向盘,安全着陆。
新手司机则因为经验不够,经常采用急刹、急打方向盘的方式急停,导致汽车出现强烈侧滑甚至调头无法控制,这样容易出车祸。
一般,老司机的套路是,如果前轮爆胎,握紧方向盘,慢慢减速,可以挂空挡或逐级减挡,松开油门踏板并反复轻踩刹车,将汽车缓慢停下来。
换到智能车时代,尤其是高级辅助驾驶系统在部分接替人类司机驾驶功能时,爆胎情况就变的更复杂了!
因为机器与人类司机同时在判断路况状态。
究竟是根据AI判断来决策还是根据司机自身来决策,执行指令是否会互相冲突,无形上增加了难度。
也给设计AI算法的工程师提高了门槛!
我们以标杆车特斯拉为例,特斯拉的AEB(紧急制动)功能业内非常知名。
AEB的工作原理,是通过雷达、摄像头等传感器,探测到距离前方物体过近时,会主动触发紧急制动。
简单来说,AEB就是在驾驶员未注意危险情况或者来不及对意外情况作出反应时,系统自身产生制动减速,以减小碰撞速度甚至完全避撞的功能。
在面对爆胎、靠近前方车辆要撞到障碍物时,特斯拉AEB系统就会启动,紧急制动停车,起到降低事故发生频率、保障行车安全的作用。
但,这玩意儿,并不一定靠谱,系统经常会下刹不住车,或者不刹车继续开的指令。
特斯拉刹不住车出车祸的案例也屡见报端。
所以,AEB只是驾驶安全辅助系统之一,制动安全主要还是取决于驾驶员的安全驾驶和及时制动动作。
为此,吉利的工程师,提出了一个新的技术方案,来完善车辆爆胎的智能控制办法。
吉利技术方案设计思路
整体思路不复杂!就是针对爆胎的智能驾驶车辆进行了有效的智能控制,使得智能驾驶车辆在发生爆胎至车辆停止的这一高危时间段内,能够基于控制的行驶轨迹,对道路环境中的障碍物体进行及时避让,从而有效提升了智能驾驶车辆的安全性以及稳定性。
1)对车胎装传感器,包括,胎压传感器、声音传感器等具有爆胎检测功能的物理传感器。
2)对车辆装传感器,包括:视觉传感器、毫米波雷达、超声波雷达以及激光雷达等具有检测定位功能的物理传感器。
实施例中,为进一步确保车厢内部的乘员安全,可以基于预设的稳态控制模型,对获得的上述爆胎信号及车辆环境信息进行融合分析,以根据预设的控制规则,在模型分析出的车辆控制区域中,确定针对所述智能驾驶车辆的车辆控制轨迹。
吉利工程师设计了一套爆胎后的车辆控制规则,可以包括以下任意一种或组合:
规则1:当确定智能驾驶车辆的当前车道的预设距离内无障碍物体时,在上述车辆控制区域内,智能驾驶车辆的当前车道中,确定针对智能驾驶车辆的车辆控制轨迹。
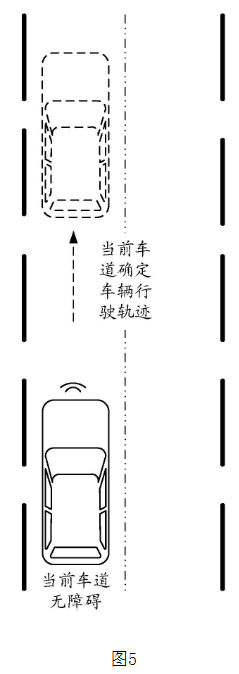
示例性的,参阅图5所示,假设t+1时刻中,智能驾驶车辆101a的当前车道的预设距离(假设为50m)内无障碍物体时,则智能驾驶域控制器可基于预设的稳态控制模型以及确定的上述控制规则,对获得的爆胎信号及相应车辆环境信息进行融合分析,并在智能驾驶车辆101a的当前车道中,确定用于所述智能驾驶车辆101a进行减速的车辆控制轨迹。
规则2:当确定智能驾驶车辆的当前车道的预设距离内存在障碍物体,且智能驾驶车辆的相邻车道的预设距离内无障碍物体存在时,在车辆控制区域内,智能驾驶车辆的相邻车道中,确定针对智能驾驶车辆的车辆控制轨迹。

示例性的,参阅图6所示,假设t+1时刻中,智能驾驶车辆101a的当前车道的预设距离(假设为50m)内存在障碍物体,则智能驾驶域控制器可基于预设的稳态控制模型以及确定的上述控制规则,对获得的爆胎信号及相应车辆环境信息进行融合分析,并在智能驾驶车辆101a的相邻车道中,确定用于所述智能驾驶车辆101a进行减速避让的车辆控制轨迹。
规则3:当确定智能驾驶车辆的当前车道的预设距离内存在障碍物体,且智能驾驶车辆的相邻车道的预设距离内也存在障碍物体时,在车辆控制区域内,基于智能驾驶车辆中,至少一个乘车乘员的乘车位置,确定针对智能驾驶车辆的车辆控制轨迹。

示例性的,参阅图7所示,假设t+1时刻中,智能驾驶车辆101a的当前车道的预设距离(假设为50m)内存在障碍物体,且智能驾驶车辆101a的相邻车道的预设距离(假设为50m)内也存在障碍物体,则智能驾驶域控制器可基于预设的稳态控制模型以及确定的上述控制规则,对获得的爆胎信号及相应车辆环境信息进行融合分析,并根据智能驾驶车辆101a中,至少一个乘车乘员的乘车位置,调整智能驾驶车辆101a的碰撞角度,并进一步确定最优碰撞角度下,针对智能驾驶车辆的车辆控制轨迹。
最后,根据情况向周围下达警示信号预警!
【转载请注明德高行·知情郎】
原文标题 : 高速爆胎了怎么办?吉利新AI专利帮老司机规避爆胎撞车风险






