
03集度最新9个智能驾驶专利
众所周知,脱胎于百度的集度的优势是软件层面、AI算法层面。
集度目前2000多名员工中,70%是软件工程师,百度的Robotaxi,和集度在算法、场景库上是共用的。
所以,集度ROBO-01交付时就会有场景融合,而不是大多数车企那样先从高速导航辅助驾驶开始做起。
李彦宏也一直高调说要做汽车机器人,而不是汽车!
你懂得,机器人概念其实就隐含了三个条件:一是语音,而且是真正复杂的语音和语义识别;二是自动驾驶,要能识别环境、规划决策;三是自我迭代,机器人要可以自然交流、自由移动、自然成长。
集度也是一直强调,汽车未来的竞争会逐渐转移到对算法、对芯片、对算力的驾驭,制造只是基础能力。
专利量也佐证了集度的技术能力。
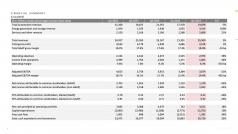
从专利维度看,在德高行全球专利数据库中,集度汽车拥有中国专利139件,包括发明公开84件、发明授权1件、实用新型50件、外观设计4件。
多数发明公开专利关于车辆控制、智能驾驶算法等领域,看看集度最新的9个智能驾驶专利,他们工程师如何处理技术难点。


04经典能量回收专利解读
除了上面这些最新公开的专利,集度还有一个经典能源回收系统设计的专利!
该专利名为,一种能量回收方法、设备、车辆及存储介质(CN114211970A),集度工程师设计了一套技术方案,这方案能够根据驾驶员的驾驶习惯设定能量回收自适应系统的回收等级,减少了驾驶员踩刹车和油门的频率,提高了回收效率。
构思很简洁实用,让人眼前一亮。
技术背景
随着城市内电动汽车的日益普及,电动汽车的节能和续航问题成为限制电动汽车在长途场景下替代燃油车的主要问题。
为了节能减排,就必需降低电动汽车能耗,提高电动汽车的续航里程。
面对该问题,现有的电动汽车大多配置有能量回收自适应系统,其将制动时损失的能量进行回收,并在电动汽车加速或上坡时再利用,可以有效提高电动汽车的续航能力。
但是,驾驶员对现有的能量回收系统褒贬不一,尤其是在下坡工况下,驾驶员手动调整能量回收等级后经常出现升高一个等级嫌慢,降低一个等级车辆速度又过快的问题,面对这样的情况,现有的技术方式大多是提高能量回收系统回收等级的可调节数量,将更多的挡位开放给用户选择,导致用户调节回收等级较为繁琐。
所以,集度的工程师就设计了一种能量回收方法,以解决现有的车辆能量回收等级与驾驶员驾驶习惯不匹配的问题。
整个技术方案较为复杂,且是专门针对下坡车况,强调的是车辆在下坡路滑行时的能量回收方案。
简单说,通过在下坡工况时,根据车辆所在坡道所处的坡度区间的历史能量变化数据,得到对应的能量回收等级,使得驾驶员行驶过的坡道越多,历史能量变化数据也越多,得到的能量回收等级也越符合驾驶员的驾驶习惯,降低驾驶员踩刹车和油门的频率,提高驾驶体验,解决了现有技术中能量回收的回收等级与驾驶习惯不匹配导致驾驶员频繁踩刹车和油门的问题,提升了能量回收的效率,同时不增加能量回收等级的可调节数量,避免了调节到与驾驶员驾驶习惯相匹配的能量回收等级操作繁琐的问题。
看看技术方案亮点
问题一:如何处理下坡路坡度不同的问题,如何处理不符合激发能量回收系统的下坡路段。
集度工程师的思路是设置不同坡度区间,举例,将不同坡度区间分层:
将3°至4°的坡度设置为同一坡度区间,此次下坡工况的测量坡度为3.8°,则车辆之前驶过3.5°的下坡工况时所使用的能量回收等级能够用于设置该次的能量回收等级。
同时,因为有些下坡路段过于短,没必要频繁激发能量回收系统,造成系统资源浪费,可以通过预设阈值的方式,解决下坡路段长度问题。
举例来说,第一预设阈值为2分钟,当车辆在下坡道路上行驶超过2分钟后,则认为该坡道的长度满足下坡工况的长度阈值,其主要目的时排除长度较短的下坡路段,频繁的切换能量回收的策略易降低能量回收的回收效率,且容易产生大量参考性较低的历史能量变化数据,降低第一能量回收等级的准确性。
问题二:能量回收的取值算法?
这个专利的核心就是这个能量回收算法如何设计,能够更有效优化能耗问题。
算法逻辑是:通过车辆刹车系统消耗的能量及动力系统增加的能量来调整能量回收等级,有效避免了使用实体按键或虚拟按键来调整能量回收等级所带来的操作复杂和需要转移视线以及手离开方向盘的问题。
第一能量回收等级为根据第一能量调整值中的至少一项确定的。(在解释如何确定能量回收模式)
如何确定第一能量调整值?
根据车辆所在坡道产生的第一力矩、车辆的车速产生的第二力矩、车辆的滑行力矩及车辆的刹车因子确定的!


所述ΔT1为调高的值,k1为刹车系统消耗的能量系数,刹车系统消耗的能量越高、能量系数越大,Mg为整车重力,θ为坡道度数,R动载半径为车辆动负荷半径,v为当前车速,A,B,C为该车辆滑行阻力曲线的系数,T滑行为滑行扭矩。
需要说明的是,车辆在坡道产生的第一力矩可由整车重力、动负荷半径及坡道度数得出,车辆的车速产生的第二力矩,可由车辆的重量及当前车速得出,车辆的滑行力矩可由车辆滑行阻力曲线的系数结合上述参数得出,车辆的刹车因子可由刹车系统消耗的能量系数得出。
需要说明的是,车辆动负荷半径以及车辆的滑行阻力曲线的系数需要根据车型及实验数据进行设定,每一个型号的车辆在设计和制造后可以获取到相关的数据,从而得到其在道路上行驶时的动负荷半径以及滑行阻力曲线的系数。
总体而言,这算法跟根据车系统消耗的能量及动力系统增加的能量调整回收等级的具体方法,并通过公开相关参数及计算公式,使用客观科学的方法调整回收等级,在无需人工干预与调整的前提下,使得踩踏刹车和油门能够对能量回收等级进行调整,符合驾驶直觉,在不增加学习成本的前提下,实现了回收等级的自适应调整,在不增加按键或虚拟按键,无需驾驶员主动调整的前提下,使得能量回收的回收等级符驾驶员的驾驶习惯,提升了驾驶体验。
【转载请注明德高行·知情郎】
原文标题 : 集度概念车落地!经典AI专利解读:下坡路能量回收算法精准降能耗









暂无评论