监制|何玺 排版|叶媛
前不久,特斯拉的FSD(完全自动驾驶系统)推出了V12版本。相比之前的FSD V11版本,V12主打的“端到端”在路线上有了根本性的改变。
面对特斯拉的“端到端”智驾新路线,国内车企到底要不要跟进?这个问题,极可能事关新能源汽车产业未来十年的成败,非常值得关注。
01
智驾,新赛点和存在的问题
回顾近年来汽车领域的发展,不难发现新能源技术的突飞猛进,已经彻底改变了人们对于汽车产品的观感和购买决策过程。在传统燃油车占统治地位的年代,品牌、价格、外观内饰等三大因素,一直都是人们购买决策的核心要素。及至新能源技术兴起后,自主车企群体先是改变了合资、外资品牌的主导地位,进而又利用产业链优势,把汽车价格迅速拉到普惠水平,甚至在外观内饰上也掀起了诸如“冰箱彩电大沙发”的新浪潮。就在人们以为汽车市场的新格局已经成型之际,新能源技术的快速演进,又再次让消费者的购买心智发生重大变化。
智驾技术,在仅仅两三年内,就成为与品牌、价格、外观内饰并驾齐驱的“第四大”购买决策因素。
这个趋势,其实在2021至2022年已经初见端倪,但进入2023年后进展更加迅猛。年初,当几大新势力车企宣布要以NOA(领航辅助驾驶)为主,向市场全面推广智驾技术时,多数消费者仍保持着观望态度,但随着几个智能泊车、以及汽车在道路上智能避障视频的全网疯传,人们对智驾的重视程度快速提升。到了国庆假期的销售黄金季,智驾对用户购车决策的影响力更是到达新高度。据公开数据显示,问界M7车型的用户中,有50%都选择了智驾版本。而蔚来的城市NOA版本NOP+,更是在同一期间内获得了7万名以上车主的选择。一切都显示,以智驾为主的新打法,已经成为新能源汽车领域“下半场”的主流。2024年,智驾无疑将进一步巩固自身消费者购车"第四决策因素”的地位。
这种愈演愈烈的新趋势,在市场上的实际表现,就是各大车企纷纷高调宣传 “NOA开城”。2022年起到现在,从长城到小鹏、再到智己、问界,几乎所有新势力车企都公布了自身的“开城计划”,誓言要在一定时期内,完成高阶智驾体验向全国主要城市的覆盖,以实现领先的竞争地位。一时间,智驾已经被定位为新能源车企技术优势的标杆,甚至被视作整个中国新能源领域打破燃油车垄断传统、在全球范围内实现“弯道超车”的依托。
然而撇开纷纷扰扰的市场宣发,仔细观察车企们智驾体系的技术本底,就难免会发现,国产车企们赶超世界一流的动人愿景,实际上却有着不可忽略的短板,就是他们的智驾方案在架构上存在缺陷。
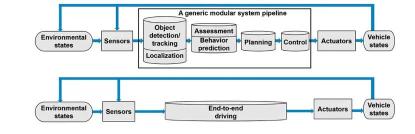
目前国内新势力品牌的智驾体系,在架构上基本都采用了所谓“模块化”技术路径。该技术路线的特点是整个智驾系统被划分为感知、规划决策和执行三个部分来分别实现,其中感知部分类似于人的眼睛和耳朵,而规划决策和执行,则相当于人的大脑和四肢。在这个架构下,从规划到执行控制的所有动作,都以一种“触发”式的被动模式来完成。简言之,就是将各种驾驶场景抽象概括为不同的数据模型,当从传感器传来的数据变量达到一定的阈值后,就会触发程序预先“编制”好的反应,从而实现包括转弯、变道、刹车等在内的驾驶行为。在这条技术路径上,国内车企的“智能化”主要集中在感知模块内。换言之,其智能化主要体现在“眼睛、耳朵”上,而在规划决策这个关键部位,依然还处在被动反应的阶段。
也就是说,当前大多数车企智驾采用的模块化方案都存在不足。
02
端到端,智驾新路线
既然当前车企采用的模块化方案存在问题,那有没有更好的智驾解决方案呢?答案是肯定的。那就是特斯拉在去年底推出的“端到端”智驾新路线。
特斯拉于去年底推出的“端到端”智驾解决方案和当前大多数车企智驾方案的主要区别,就在于“端到端”这个特征上。所谓“端到端”,指的是汽车传感器捕捉到的“道路端”场景,不会被传递给预先编制好的程序模块中,去进行“条件反射”式的计算,而是直接被送给一个AI神经网络计算中枢,由这个高度接近人类大脑的智慧中心会像人类司机那样去进行实时思考、分析。而得出的控制指令,则直接传递给汽车操纵系统,实现对“驾驶端”的输出。简言之,“端到端”就是把汽车智驾系统做成类似于人的“大脑”,能与人一样进行理解分析。而相形之下,国内车企目前的智驾系统,更像是一台只会在特定情况下,做出预设反应的“自动机”。
2023年12月5日,特斯拉FSD V12迎来了马斯克不断强调过的“里程碑时刻”,它在8月份成功完成视频测试后,终于被推送到了1万5千名员工的汽车上,开始上路使用。而马斯克本人,当然也是首批使用者之一。他在FSD V12尚处于Beta阶段时,就高调进行了试驾直播。在那段45分钟的试驾路程里,马斯克只人工接管了一次车机,其余时间全部由FSD自主完成。从视频情况来看,FSD的智慧性、操控效率、安全性都令人印象深刻。许多特斯拉员工在网上发表试驾体验时,还不忘提及马斯克此前说过的话“L4/L5级别自动驾驶即将实现”。他们认定,FSD就是朝向L4/L5级自动驾驶的大道。特斯拉高层则表示在今年之内,FSD就将实现“安全指数达到人类驾驶员的10倍,汽车价值提高5倍”。
从技术层面上来看,特斯拉FSD V12与当前车企通用的智驾方案,在实现路径上就有着根本的不同。在过去,几乎所有的智驾系统都是采用被动触发式的“规则驱动”算法来架构。这就会导致两大问题:首先,其系统的处理模块多、操作步骤复杂、流程分支多,因此不同模块和流程之间难免会存在“级联误差”,也就是一处出错会导致整个体系内的差错互相累积,最终造成不可接受的系统崩溃、给用户带来体验降级甚至安全危险。同时,由于旧模式在规划决策这个核心部分上,完全依赖预先制定好的规则,这就必然导致系统程序庞杂,会造成系统维护难度大、占用资源更大的问题。
而特斯拉FSD V12在架构上,就去除了规则主导这个老旧部分,转而用数据驱动的端到端AI大模型,取代了传统的感知、描述、预测以及规划等多个模块,没有程序员写一行代码来识别道路、行人等概念,把整个驾驶决策全部交由AI神经网络中枢去做,在模拟出接近人类大脑的智能性同时,还实现了从道路数据到操作控制的端到端直连,大幅减少了传统系统难免的级联误差。同样值得注意的是,由于端到端技术在架构上的简洁,使得FSD系统变得空前精干,它比传统智驾系统足足减少了30万行的C++代码量,可维护性更强。
正是因为这些优势,让FSD不需要像传统智驾系统那样,过于依赖传感器的精度。因此也不再需要像国内车企那样,在诸如高精激光雷达这样的昂贵元器件上“狂卷”,能够在降低成本的同时,还能给用户带来更好的智驾体验。
03
国内汽车厂商究竟要不要跟进端到端路线?
当然,端到端技术路线尽管具备众多优势,但其实现并不容易,这一点从特斯拉FSD自身的发展过程就能看出。自3年前首次推出测试版依赖,FSD在路上试驾中历经了安全事故、驾驶者对驾乘体验的不满评价等多重障碍甚至挫折,导致其全球口碑也不断起伏。造成这种状况的根本原因在于,FSD虽然由于取消了规则驱动和大量的庞大代码,实现了端到端直连,但也正因为其规划决策从传统的程序模块,转到了AI神经网络中枢,因此它的演进和完善就当然要大量依赖数据和训练模型,试错成本比传统模式明显更高。例如在过去一两年中,不少司机就在试驾中抱怨过,FSD尽管变道成功率更高更顺畅,但依然存在诸如幽灵刹车、导航配合度不够等方面问题。
为了解决这个问题,FSD在几年内依托全球数百万的特斯拉汽车保有量,不断输入视频数据对系统进行训练,直到完成了千万级别的视频训练量之后,才终于推出了V12版本,让驾乘体验有了本质的提升。这个数据量、时间成本,很可能会让国内一些有志于进军端到端路线的车企“望而生畏”。另外,端到端的智驾模式当前在世界各国也还需要面对一些法律法规方面的障碍。例如在美国加州,最近就通过了一项新法律,禁止车企过度宣传端到端智驾系统的“全自动驾驶”能力。这说明,社会各界对端到端智驾系统摆脱“规则驱动”,而试图模拟出“接近人类大脑”规划决策能力的技术方向,依然抱有怀疑态度。这也会让端到端这条全新智驾路线,面临一些不确定因素。
优势明显、障碍也存在,了解了端到端路线的发展状况后,国产车企到底应不应该跟进这个新技术路径?玺哥个人的看法是:要跟!不仅要跟,而且速度还必须快!原因有二,首先,在我们目前所通用的传统模块式智驾系统中,每个组成模块都包含着多个小模型的组合,如感知模块可能包含分类、追踪和定位等不同 AI 模型,各司其职。这个复杂的模块式架构,会随着软硬件升级与逐步深入,导致对计算能力和海量数据处理能力需求的指数级暴增。因此自主产业想要在未来持续保持领先,就不能再固收传统的模块模式。
其次,新的端到端路线在大量试驾中已经展现出了体验优势。例如,多为资深驾驶者都评价认为,“FSD车技堪比人类司机,能够熟练地进行变道并规避过往的货车“,每一次通勤,高速接管的频率“基本保持在5次以内”。甚至“用FSD进行远途旅行时,体验比较丝滑”等,而且在高速场景下自动巡航、自动变道、自动超车等功能“表现比人工驾驶还好”等。显然,无论从厂商竞争角度,还是从用户体验角度来看,这种带着明显优越性的新技术路径,都是值得跟进的。
尤其要提醒的是,在当前汽车市场竞争日趋白热化的大背景下,谁不跟进新技术路线,谁就有可能在下一步遭到淘汰。事实上,国内已经有不少厂商开始动作了。一句话,有志于全球竞争的自主车企得抓紧了。
原文标题 : 特斯拉力推的FSD V12端到端路线,国内汽车厂商究竟要不要跟?