2023年新能源车流行800V高压系统上车,拼的是充电时间和能耗表现;2024年新能源车流行激光雷达上车、流行高速NOA和城市NOA,拼的是谁的算法更强,高阶智能驾驶开通率更高。以至于最后可能拼的是谁的神经网络更强、学习能力更快,谁才有可能做出更好的NOA效果。
至少我们熟知的那些新势力品牌们,都已经在智能驾驶领域中有了一定的突破,但目前市面上对于智能驾驶的应用方案中来看,有激光雷达融合感知方案,也有纯视觉感知方案。这两大方案流派构成了目前高阶智能驾驶的全部。而且高阶智能驾驶功能,都包含了城市/高速NOA功能。
那么,没有激光雷达的城市NOA方案,到底还适不适合2024年了?
激光雷达,会帮你很多

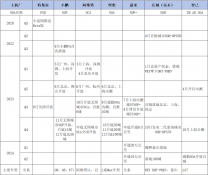
如果2022年是激光雷达量产的元年,2023年是装车量开始起势的一年,那么2024年就可以说是城市NOA(城市导航辅助驾驶功能)落地的元年。目前,行业内像AITO问界(华为)、理想、小鹏等车企都逐步开放了目标城市,城市数量也是一个比一个多,而城市NOA的落地也带来了一个衍生问题。
激光雷达,对于城市NOA到底重要不重要。
聊这个问题之前,需要梳理清晰城市NOA所对应的功能都包含了什么。早些年,ACC自适应巡航+车道保持等配置的加入,一定程度上让驾驶员能轻松一些,这也是我们当年能接触到的最高级别的辅助驾驶功能了。

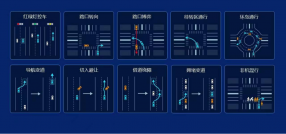
反观现在,城市NOA将实现根据导航指引,从A点到B点的辅助驾驶功能,例如跟车行驶、刹停、并线;路口的左右转弯、根据信号灯指示停车/行进;在停车场自动泊车、泊出等等。要实现这些功能,需要有算力足够高的芯片支撑之外,还需要一系列强大且精准的感知硬件来完善才可以实现。
上述,是为了让各位明白,城市NOA里感知硬件面对的情况非常复杂且多变,相比于高速NOA的工作条件,城市NOA面对的难度是成倍数增长的。
从现阶段落地的重感知方案看,主要有两类,第一种多采用的是激光雷达,但2023年的下半年开始,第二种的纯视觉方案城市NOA方案也逐渐在增加,例如百度Apollo City Driving Max、大疆车载成行平台-9V、特斯拉FSD以及极越等。
聊一聊底层逻辑。
视觉感知,无外乎用摄像头做主感知硬件,它提供的信息将会有很大的决策比重;其余的超声波、毫米波雷达,存在感不大,只是在这套系统里辅助一样的存在;另一个核心,是背后的大模型以及学习能力;用摄像头收集来的信息,做3D重建,然后判定物体。
激光雷达,则是主要依靠激光雷达的点云来完成对物体的探测,而点云生成的速度可以高达数十万点/秒,精确程度是摄像头转3D建模很难达到的效果;一颗激光雷达做前向不够用的话,还可以侧向2颗、后向1颗,满足整车360°的激光雷达探测覆盖;然后现在激光雷达也有大模型的倾向,逐渐抛弃高精地图的模式,看似和纯视觉方案有些类似,但激光雷达能提供的数据精度,远远由于纯视觉方案。

不讲大场景工况下的使用,例如在行泊一体的准L3工况下,自动泊车功能对于周围物体的数据准确性非常高,加入侧向激光雷达之后,这个探测距离可以做到0.05米。如果依靠视觉方案的话,侧向感知,只能依靠毫米波、超声波雷达来提供支持。
视觉方案,是不是走不通了?

视觉感知这套路线,优点是便宜,但缺点更凸显,例如对于深度信息的检测不足,还有对三维空间的构建都是短板,并且是长期存在的问题。但现在衍生出了大模型来弥补这两个短板,极越和百度的合作,是国内第一个用上Occupancy Network技术的。
而这项技术,特斯拉也在用。
大致意思就理解成,学习函数空间并且用三维重建方法来展现3D空间的方式,用视觉素材+算法,来实现类似于激光点云的效果。这套视觉感知方案的功能,存在不确定性,例如一辆特斯拉Model Y在美国底特律西南部一个十字路口撞上了一辆白色半挂卡车。据事故报告称,事发当时该车开启了Autopilot模式,不过系统AI算法将停在路上的白色货车车厢识别为了天空。

于是,导致车辆没有进行任何刹车行为就直接撞了上去。这就是视觉方案的弊端,相比于视觉方案,激光雷达则是类似于“触觉”的感知,可以探测到百米远的物体,属于什么材质,而不会出现视觉判定可以把白色车辆识别成天空的问题。
这么说吧,就连现在的特斯拉也没能拿出特别成熟的纯视觉方案,现阶段更多的是让纯视觉方案的算法变得更好。间接的表明了这条路不好走,很难,不是为了低成本的话走这条路真的不合适。但在特斯拉更新了FSD V12版本,搬出了神经网络学习能力之后,缓解了纯视觉方案的某些不足,让其不在依赖单纯的数据,而是具备了强大的学习能力,类似的场景下可以根据学习到的人类驾驶员的处理方式来进行指令操作,在美国本土市场的实测来看相对顺畅,偶尔需要人类来接管,对于目前的L2级别智能辅助驾驶来说,能力足够,但对于L3级别的辅助驾驶场景暂时还不能下定论。
能力层面,行车这一块基本实现的差不多了,例如高速NOA功能实现的效果能类似于激光雷达,只要做的足够保守,也能好用。但是,城市NOA工况下,仍然在啃一些大场景的难点,例如像路边停靠的车辆这种场景,视觉方案无法识别这台车究竟是动态还是动态,如果这台车突然起步,视觉判定可能依旧是静态的,敏感度较低带来的弊端。

以目前纯视觉感知的方案来判断,两个发展导向。
第一种,它将以性价比优势打通20万元以下车型的智能驾驶方案,但不适用于城市NOA功能,更多是支持高速NOA功能的实现,加快低等级智能驾驶的落地。第二种,满足城市NOA和高速NOA两种工况的使用,但算法策略会倾向于更加保守的方案,整体使用的舒适度不如有激光雷达的方案。
业内部分企业的选择更倾向于第一种方案。
激光雷达在2024年将成为大部分品牌刚需配置,尤其是使用到华为提供的ADS高阶辅助驾驶的品牌。还有像蔚来、理想这些激光雷达坚定的企业,小鹏汽车虽然在激光雷达的使用上依旧偏向保守(有纯视觉的想法,但在犹豫),但目前的方案仍然基于激光雷达来做的。

不是否认视觉方案的能量,但我们得正视它性能上的局限性,做城市NOA可以,但特斯拉也在不断提升纯视觉感知下城市NOA的功能,来让它更好用。之后还要考量国内不同城市的不同道路习惯,对于更依靠算法的视觉方案来说,将会是极为庞大且繁琐的“学习压力”。
反问几个问题:
1.当激光雷达被各大厂商打下来的时候,纯视觉还有必要么?
2.激光雷达便宜之后,特斯拉转向了,现有纯视觉拥趸跟不跟?
3.视觉感知局限性,没有强大神经网络的话,是不是不如激光雷达好用?
另外,补充一句特斯拉FSD今年落地中国市场的可能性非常大,2023年已经开始陆续测试。最终FSD的使用效果,可能会最终决定纯视觉、激光雷达的城市NOA方案走向。特斯拉FSD V12来国内面临第一个问题,在国内场景下做适配,这不是难题,短期内很好实现。适配之后,能不能用在美国市场那套方案打通国内的城市NOA做出同样的效果,是一个问题;其次,特斯拉FSD的城市NOA开城率,能不能追平现在的激光雷达方案的新势力们,又是一个问题。
今年,特斯拉领头的纯视觉方案,和一众新势力们选择的激光雷达方案,在高阶智能驾驶面向L3之前,市场或许会给出一个明确的选择。
作者丨路咖汽车
原文标题 : 特斯拉FSD,将决定2024,激光雷达在中国的生死?