芝能科技出品
2025年城市NOA和高速NOA变成了非常火热的词汇,我们需要理解城市NOA(导航辅助驾驶)系统能做什么和不能做什么?
通过融合导航系统与自动驾驶功能,实现从起点到终点的全程辅助驾驶,尤其是在复杂的城市道路环境中,需要实现基本的车速保持和车道保持功能,还需应对多样化的驾驶场景,包括跟车行驶、变道操作、交叉路口通行、前方车辆变换与弱势目标避让、障碍物避让及多种掉头操作等。
我们基于智能驾驶功能测试场景的定义、验证要求和性能指标,系统分析城市NOA系统所需的关键功能,探讨其在实际城市工况下的安全性和稳定性验证方法。对测试场景的深入剖析,可以让我们理解如何评价目前技术进展的状态。

01
智能驾驶功能测试场景:
多样性及其重要性
城市NOA系统的核心目标是实现无需人为接管的点到点自动驾驶,这要求车辆在复杂的城市环境中能够准确响应导航指令,安全完成各种驾驶操作。
为确保系统的可靠性和安全性,功能测试场景的设计必须全面覆盖实际驾驶工况,并通过明确的测试定义和性能指标进行验证。
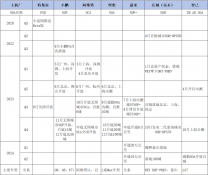
除了基础的车速保持和车道保持功能外,以下几类常见功能场景在城市NOA系统中尤为关键:
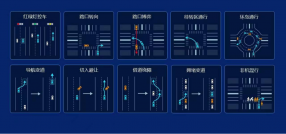
● 跟车行驶功能

跟车行驶是城市驾驶中常见的场景,涵盖稳定跟车、前车变速行驶和目标车切出三种子场景:
◎ 稳定跟车:测试车辆需在目标车以5~100 km/h定速行驶时,保持安全的车间距离。例如,自车与目标车后轴的横向偏移需≤0.6 m,车间时距≥0.8 s。这一场景验证了系统在常规跟车状态下的稳定性。
◎ 前车变速行驶:当目标车以3 m/s²减速至静止,并在3 s内以1.5 m/s²加速至60 km/h时,自车需平滑调整速度和距离,跟停后纵向距离≥1 m,且加速度变化率均值≤5 m/s³。这一测试评估了系统对动态目标的响应能力。
◎ 目标车切出:目标车以2060 km/h行驶并以0.51 m/s横向速度切出车道,自车需在10 s内完成平稳调整。这一场景验证了系统在目标车辆突然离开时的适应性。
● 变道与并/换道行驶
变道操作是城市NOA系统实现导航路径切换的关键功能,具体包括:
◎ 变道行驶:驾驶员触发换道指令后,自车需平稳进入目标车道并恢复车道保持功能,左右各测试一次,确保操作的平滑性和安全性。
◎ 并入主道:自车从匝道汇入高速主道时,需根据导航指令安全完成并道操作,避免与其他车辆冲突。
◎ 进入匝道:自车通过高速汇出匝道时,需平稳切出主道,保持导航路径的连续性。
● 交叉路口与环形路口通行

城市道路中的交叉路口和环形路口是NOA系统面临的高复杂性场景,测试内容包括:
◎ 交叉路口直行:自车以40~60 km/h通过至少双车道的复杂路口,要求平稳穿越,避免因道路错位导致失误。
◎ 交叉路口右转:自车从非右转车道起步,以30~60 km/h完成右转,验证导航指导下的转向能力。
◎ 交叉路口左转:自车以50 km/h左转,面对右侧50 km/h直行车辆的路径冲突时,需安全完成操作。
◎ 环形路口通行:自车以40 km/h通过环岛并从指定出口驶出,测试其在环形路径中的导航和行驶能力。
● 前方车辆变换与弱势目标避让
城市环境中,车辆和行人/自行车的交互频繁,系统需具备以下能力:
◎ 前车切入:相邻车道车辆以1.0~1.1 m/s切入自车前方时,自车需平稳调节车速和车距,保持安全。
◎ 前车变换:目标车在与前方低速车TTC(碰撞时间)为2.8 s时变道切出,自车需平稳调整至新的跟车状态。
◎ 避让行人/自行车:自车在实线车道遇前方行人或自行车时,需减速跟随,确保安全距离和平稳性。
● 障碍物避让与U型掉头

道路障碍物和掉头操作是城市驾驶中的特殊需求:
◎ 避让锥桶/水马:自车在双车道上以设定速度行驶,遇右侧障碍物侵入时,需变道绕行,横向距离内边缘1.5 m,纵向距离>100 m。
◎ 交叉路口掉头:自车以50 km/h在导航指导下完成U型掉头,要求操作平稳。
◎ 专用分叉口掉头:在专用掉头路口以50 km/h完成U型掉头,确保路径执行的准确性。
● N型掉头
N型掉头是城市NOA系统中一项复杂功能,测试场景定义为在双向两车道的交叉路口进行掉头。
自车设定导航路径后,以50 km/h巡航速度稳定行驶,完成掉头操作,要求平稳性作为性能指标。这一场景验证了系统在狭窄空间和多方向交互中的导航执行能力。
02
城市NOA系统
测试场景的验证要求
与性能指标分析
为确保城市NOA系统的功能实现,测试场景需通过严格的验证要求和量化性能指标进行评估。
从技术角度深入分析几个关键场景的测试设计及其意义:
● 跟车行驶功能的动态响应能力:跟车行驶功能的测试不仅关注静态距离保持,还需验证系统对动态变化的适应性。
例如,在“前车变速行驶”场景中,目标车减速至静止并重新加速的过程模拟了城市道路中常见的拥堵和起步工况。自车需在3 s内完成跟停,并在加速度变化率≤5 m/s³的约束下实现平滑加速。这一指标直接反映了系统的控制精度和乘客舒适度。
此外,“目标车切出”场景中10 s的调整时间窗和≥0.8 s的车间时距要求,确保了系统在突变工况下的安全冗余。
● 变道与并/换道行驶的路径规划能力:变道操作依赖于传感器感知、路径规划和执行控制的协同工作。
以“变道行驶”为例,自车需在驾驶员触发指令后,结合周围环境完成左右换道,性能指标为“平稳完成”。这一模糊指标在实际测试中可细化为横向加速度≤0.3 g、换道时间≤5 s等量化标准。
“并入主道”和“进入匝道”则进一步考验系统对导航数据的实时响应能力,要求在复杂流量中安全切入或切出,体现了城市NOA系统的高级决策能力。
● 交叉路口与环形路口通行的导航协同性:交叉路口和环形路口的测试场景集中体现了NOA系统中导航与自动驾驶功能的融合。
例如,“交叉路口左转”要求自车在面对冲突路径的直行车辆时安全完成转向,这需要精确的交通信号识别、路径预测和避让策略。性能指标“安全完成”意味着零碰撞和符合交通规则的操作。
同样,“环形路口通行”测试了系统在多出口环岛中的路径选择能力,40 km/h的设定速度和“稳定行驶”要求进一步验证了其在连续曲率变化中的控制稳定性。
● 前方车辆变换与弱势目标避让的安全性:城市道路中弱势交通参与者(如行人、自行车)的存在对NOA系统提出了更高要求。
在“避让行人/自行车”场景中,自车需在实线车道内减速跟随,保持与目标的纵向距离>100 m。这一设计避免了不必要的变道风险,体现了系统对交通规则的遵守和对安全的优先级。
而“前车切入”场景中,车间时距0.4~0.6 s的短暂窗口测试了系统的紧急反应能力,确保在高密度交通中仍能保持稳定。
● 障碍物避让与掉头的执行精度:“避让锥桶/水马”场景模拟了城市道路中的临时施工或障碍,要求自车在感知到横向侵入1.5 m的物体后主动变道绕行。
这一功能的实现依赖于高精度的环境感知和路径规划,性能指标“平滑绕过”可通过横向加速度和速度波动量化。
“N型掉头”和“U型掉头”则测试了系统在狭窄空间内的低速操控能力,50 km/h的巡航速度和“平稳完成”要求确保了操作的舒适性与安全性。
小结
城市NOA系统作为智能驾驶技术的高级形态,其功能的实现依赖于多样化测试场景的全面验证,从跟车行驶、变道操作、交叉路口通行、前方车辆变换与弱势目标避让、障碍物避让及掉头功能等六个方面,分析了的常见功能场景及其测试标准。
这些场景通过明确的定义、验证要求和性能指标,不仅覆盖了城市道路中的典型工况,还为系统的安全性、稳定性和舒适性提供了量化评估依据。
原文标题 : 城市NOA中,智能驾驶功能的边界在哪里?